







進入21世紀(jì),機器人已成為現(xiàn)代工業(yè)不可缺少的工具,它標(biāo)志著工業(yè)的現(xiàn)代化程度。而隨著計算機技術(shù)、微電子技術(shù)以及網(wǎng)絡(luò)技術(shù)的快速發(fā)展,機器人技術(shù)也得到了迅猛的發(fā)展。機器人是一個可編程的機械裝置,其功能的靈活性和智能性很大程度上取決于機器人的編程能力。
由于機器人應(yīng)用范圍的擴大和所完成任務(wù)復(fù)雜程度不斷增加,機器人工作任務(wù)的編制已經(jīng)成為一個重要問題。通常,機器入編程方式可分為示教再現(xiàn)編程和離線編程。目前,在國內(nèi)外生產(chǎn)中應(yīng)用的機器人系統(tǒng)大多為示教再現(xiàn)型。
而與示教編程相比,離線編程系統(tǒng)具有如下優(yōu)點:①減少機器人停機的時間,當(dāng)對下一個任務(wù)進行編程時,機器人可仍在生產(chǎn)線上工作;②使編程者遠離危險的工作環(huán)境,改善了編程環(huán)境;③離線編程系統(tǒng)使用范圍廣,可以對各種機器人進行編程,并能方便地實現(xiàn)優(yōu)化編程;④便于和CAD/CAM系統(tǒng)結(jié)合,做CAD/CAM/ROBOTICS一體化;⑤可使用高級計算機編程語言對復(fù)雜任務(wù)進行編程;⑥便于修改機器人程序。因此,離線編程引起了人們的廣泛重視,并成為機器人學(xué)中一個十分活躍的研究方法。
早在70年代末,國外就開始了機器人離線編程規(guī)劃和系統(tǒng)的研究。在眾多的機器人仿真與離線編程系統(tǒng)中,由以色列Tecnomatic公司在1986年推出的Robcad機器人計算機輔助設(shè)計及仿真系統(tǒng)最具代表性,其通用化、完整化、交互式計算機圖形化、智能化和商品化為一體。相比于國外,雖然國內(nèi)在離線編程方面起步較晚,但因投入量比較大、重視程度比較高所以發(fā)展比較迅速。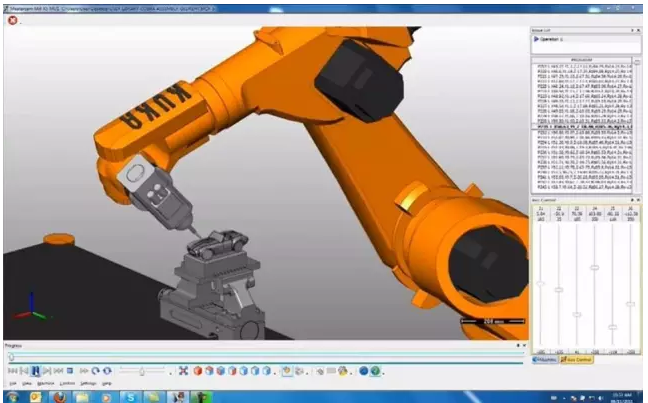
近年來,國內(nèi)外許多大中型企業(yè)都裝備了自動化加工設(shè)備和計算機輔助設(shè)備與系統(tǒng)。同時,CAD/CAM技術(shù)已趨于成熟,其高效便捷的建模手段和集成技術(shù),使之成為工業(yè)機器人編程中的有力工具。這些設(shè)備和系統(tǒng)為工業(yè)機器人的離線編程技術(shù)的研究和推廣提供了基本的硬件和軟件條件,使離線編程的實用化成為研究重點。機器人離線編程系統(tǒng)的研制和開發(fā)涉及的問題很多。包括多個領(lǐng)域的多個學(xué)科,為推動這項技術(shù)的進一步發(fā)展,以下幾個方面研究工作是必不可少的.
1)多媒體技術(shù)在機器人離線編程中的研究和應(yīng)用。友好的人機界面、直觀的圖形顯示及生動的語言信息都是離線編程系統(tǒng)所需要的。
2)多傳感器的融合技術(shù)的建模與仿真。隨著機器人智能化的提高,傳感器技術(shù)在機器人系統(tǒng)中的應(yīng)用越來越重要。因而需要在離線編程系統(tǒng)中對多傳感器進行建模,實現(xiàn)多傳感器的通訊,執(zhí)行基于多傳感器的操作。
3)各種規(guī)劃算法的進一步研究。其包括路徑規(guī)劃、抓取規(guī)劃和細(xì)微運動規(guī)劃等。規(guī)劃一方面要考慮到環(huán)境的復(fù)雜性、運動性和不確定性,另一方面又要充分注意計算的復(fù)雜性。
4)錯誤檢測和修復(fù)技術(shù)。系統(tǒng)執(zhí)行過程中發(fā)生錯誤是難免的.應(yīng)對系統(tǒng)的運行狀態(tài)進行檢測以監(jiān)視錯誤的發(fā)生,并采用相應(yīng)的修復(fù)技術(shù)。此外,最好能達到錯誤預(yù)報,以避免不可恢復(fù)動作錯誤的發(fā)生。
5)研究一種通用有效的誤差標(biāo)定技術(shù),以應(yīng)用于各種實際應(yīng)用場合的機器人的標(biāo)定。
從總體上看,機器人離線編程對工業(yè)機器人的應(yīng)用以及編程效率的提高有種重要的意義。離線編程可以大幅度節(jié)省制造時間,實現(xiàn)計算機的實時仿真,為機器人編程和調(diào)試提供靈活的編程環(huán)境。所以說離線編程的應(yīng)用必將是一個發(fā)展的大趨勢。


