







編譯:全浩
很多機器人系統都存在著自相矛盾的設計準則,因此這個“軟性氣動裝置(SPAs) ”將會是一個有前途的解決方案。“高轉矩或力量”常常意味著更重或者更大體積的設備,這不實用并且與可穿戴機器人的目標相悖。 “充氣人工肌肉”(PAMs) 的原理,從60年代就被應用于為“機械矯正器”提供動力,運用此原理的SPAs是一種可以產生彎曲動作(同時不局限于單一方向和動作)的軟性解決方案,并可以應用到更廣泛的領域。
“機械矯正器”(機械外骨骼)讓那些由于各種各樣原因受創傷的病人可以恢復運動能力,但是很多的這類設備穿戴起來不太舒服并且很笨重,所以還沒有成為普及型的應用。要想讓這類設備成為日用的、實用的東西,它們表面的觸覺界面必須要輕巧、柔順、安全并且有大量的感知和刺激點才行。一個由RRL, EPFL 和NCCR Robotics組成的團隊,近日出品了一個“軟性氣動裝置(SPAs) 皮膚”,內嵌“壓電式傳感器(PZT)”,它可以處理這些問題并且提供“震動觸覺反饋”。
“軟性氣動裝置(SPAs) 皮膚”可以把雙向的觸覺信息傳遞到簡單的、靈敏的可穿戴界面。通過創造這種SPAs界面并且將其設計和穿戴到皮膚上,就有可能創造出一種合成的“第二皮膚”,這個“第二皮膚”輕薄且有彈性,這樣傳感器就可以布置在手臂的所有位置了,類似神經穿過你的皮膚。當穿戴者彎曲他們的手臂,這種皮膚和集成的觸覺反饋系統會同時伴隨聯動。
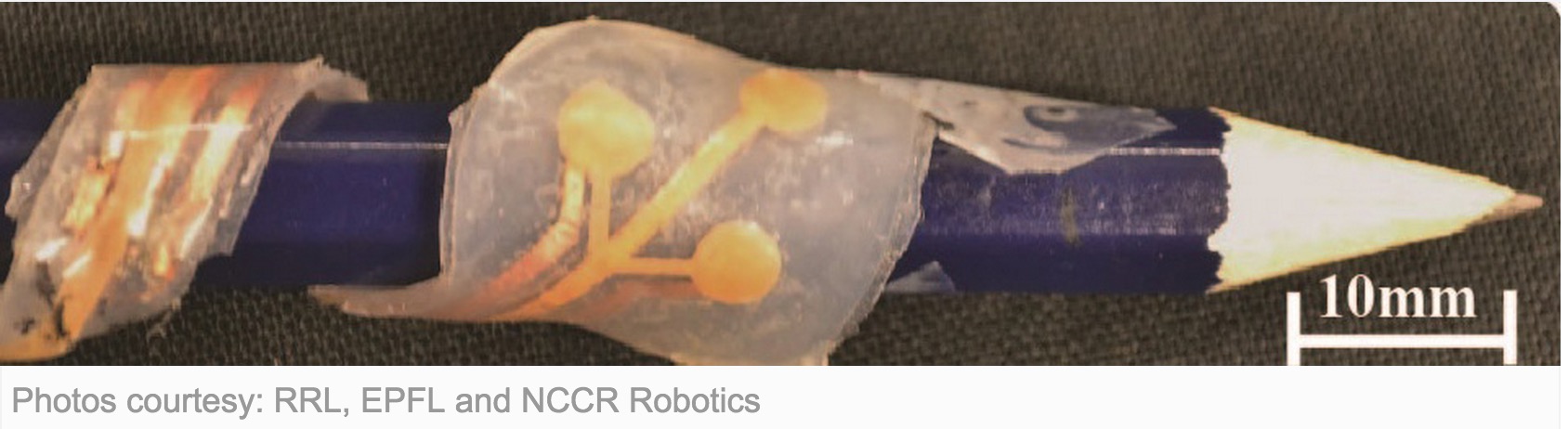
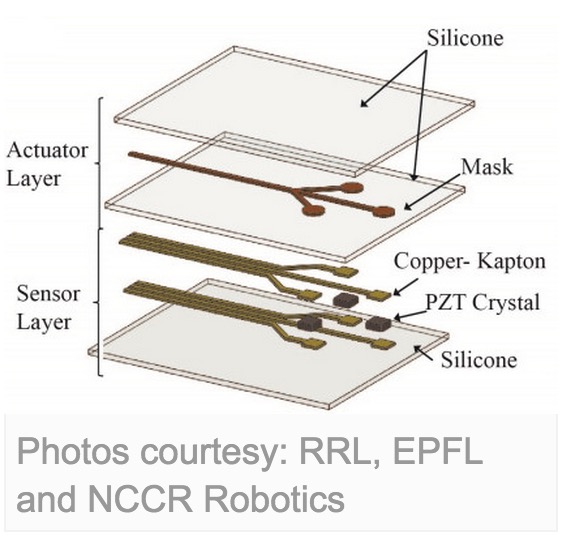
“軟性氣動裝置(SPAs) 皮膚”有兩層,一個底部的傳感層( sensor layer)和一個上部的促動層( actuator layer)。促動層由兩層硅薄板構成,兩層之間有一個罩板以防止粘連。包括集成的傳感層,最終的設計是1.4毫米厚。為了產生促動,空氣會在層級間泵入,形成直徑為3-4毫米的氣泡,這樣可以產生高達0.3N的動力,這聽起來還是很小的力,但是人類日常手掌所產生的壓力與此相當。傳感層是用壓電陶瓷元素制成,嵌入到硅薄板里,這樣可把機械壓力轉換成電壓。這種電壓然后用于測量震動的強度,震動是從促動器和SPA 皮膚接觸到的外部界面壓力產生的。
“軟性氣動裝置(SPAs) 皮膚” 產生一定頻率范圍內的“震動觸覺反饋”。當有物體接觸到皮膚時,力作用到外部界面,與此同時內嵌的傳感器可以偵測到由促動器而來的這些震動。根據這個被偵測到的傳感信息,促動器會隨后主動控制震動的強度。換句話說,這個“第二皮膚”可以偵測到它正在接觸什么東西,并且隨之調節震動,這樣的“感覺”(皮膚觸覺)會是連續的。
“軟性氣動裝置(SPAs) 皮膚” 提供了高度可定制化和可穿戴化的物理界面,同時具有多點震動觸覺信號的閉合回路控制設施。它可被應用到人類身體的任何地方。如上文所描述的,它可以成為一個即插即用的反饋機制部件單元,應用到給那些失去運動能力的病人進行訓練用的康復設備里,或者是虛擬現實游戲中提供觸感。
注:NCCR全稱為The National Centre of Competence in Research ,是由瑞士國家科學基金會創立的一個全國性組織。宗旨是開發創新的、人性化的機器人技術,促進人類的生活質量提高。NCCR研發能與人類生態共生的機器人,讓機器人能夠同時幫助個人和社會。NCCR主要致力于三類機器人的研究:可穿戴機器人、救援機器人和教育機器人。


