







應(yīng)用需求
適配嚴(yán)苛環(huán)境:生產(chǎn)車間可能存在粉塵/顆粒物/煙塵/粉體等工業(yè)粉塵,夏冬季高低溫、多雨潮濕等問(wèn)題
抗復(fù)雜干擾:工廠拆垛分室內(nèi)/半室外場(chǎng)景,環(huán)境光照射角度、強(qiáng)度、范圍變化頻繁
產(chǎn)品性能可靠:設(shè)備性能可靠,可長(zhǎng)時(shí)間連續(xù)穩(wěn)定運(yùn)行
維護(hù)操作簡(jiǎn)單:產(chǎn)品日常維護(hù)管理簡(jiǎn)單,不要求專業(yè)技術(shù)背景
性能與性價(jià)比:方案性能與業(yè)界持平乃至領(lǐng)先,極致性價(jià)比
針對(duì)以上問(wèn)題,圖漾現(xiàn)推出標(biāo)準(zhǔn)化 3D 視覺(jué)軟包拆垛解決方案,結(jié)合3D機(jī)器視覺(jué)、深度學(xué)習(xí)技術(shù)及自研配套軟件RVS-SE,系統(tǒng)性解決軟包柔性、形狀不規(guī)則、緊密貼合、復(fù)雜圖案等識(shí)別難題,實(shí)時(shí)三維定位軟包垛型,引導(dǎo)工業(yè)機(jī)器人進(jìn)行高精度、高處理節(jié)拍、高穩(wěn)定的自動(dòng)化軟包拆垛。
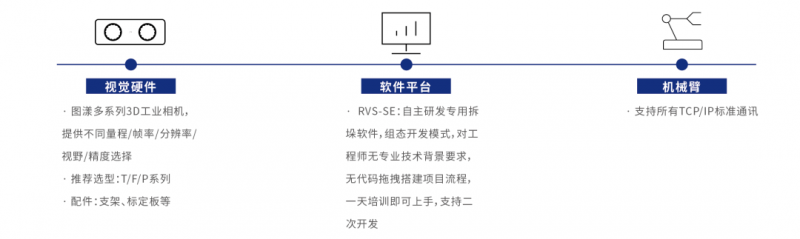
方案構(gòu)成
圖漾3D視覺(jué)引導(dǎo)軟包拆垛方案主要由圖漾核心自主專利的3D工業(yè)相機(jī)、深度學(xué)習(xí)算法及RVS-SE軟件、機(jī)械臂(可選)、工業(yè)PC等共同構(gòu)成。
通過(guò)3D相機(jī)采集垛型3D數(shù)據(jù),經(jīng)過(guò)深度學(xué)習(xí)樣本訓(xùn)練,基于RVS-SE軟件平臺(tái),實(shí)現(xiàn)通過(guò)3D視覺(jué)技術(shù)控制機(jī)械臂運(yùn)動(dòng),完成軟包定位和拆垛操作,具備高精準(zhǔn)、高效率、高穩(wěn)定的應(yīng)用優(yōu)勢(shì)。
關(guān)鍵流程
01導(dǎo)入超級(jí)模型
導(dǎo)入模型:一鍵導(dǎo)入超級(jí)模型,即可完成識(shí)別,無(wú)需樣本訓(xùn)練
* 超級(jí)模型由圖漾結(jié)合大量數(shù)據(jù)訓(xùn)練生成,可直接導(dǎo)入使用,縮減樣本訓(xùn)練時(shí)間,部分復(fù)雜項(xiàng)目可能需要額外采圖訓(xùn)練
02驗(yàn)證上線
測(cè)試驗(yàn)證:在RVS-SE軟件界面中加載拆垛系統(tǒng)算法流程。根據(jù)識(shí)別結(jié)果,指導(dǎo)機(jī)器人進(jìn)行抓取
方案優(yōu)勢(shì)
圖漾3D工業(yè)相機(jī)
高性能:高精度、大視野、大景深、抗環(huán)境光干擾等,Z軸精度最佳±3mm,高處理速率和穩(wěn)定性,視覺(jué)處理時(shí)間≤2s(圖像采集-軌跡算法輸出抓取點(diǎn)位)
視野兼容:支持移動(dòng)(eye in hand)和固定(eye to hand)安裝模式,單多相機(jī)靈活拼接,靈活拓展視野范圍
工業(yè)級(jí):最高IP67級(jí)防水防塵,適配任何苛刻工業(yè)環(huán)境,抵抗灰塵、雨水、火花、沖擊等影響,可搭配機(jī)器人實(shí)現(xiàn)7*24小時(shí)長(zhǎng)時(shí)間連續(xù)穩(wěn)定工作
RVS-SE智能軟件
智能軟件應(yīng)用,融合3D數(shù)據(jù)采集、3D點(diǎn)云分割、深度學(xué)習(xí)算法及運(yùn)動(dòng)規(guī)劃控制技術(shù),可快速準(zhǔn)確地定位隨意碼放的不規(guī)則形狀物體,無(wú)懼復(fù)雜圖案、緊密貼合等難題,實(shí)現(xiàn)對(duì)松散疊放的堆垛軟包的精準(zhǔn)定位抓取
模塊集成,便捷應(yīng)用
操作簡(jiǎn)便:視覺(jué)軟件基于組件拖拽,直觀完成流程搭建,對(duì)工程師無(wú)專業(yè)技術(shù)背景要求,一天培訓(xùn)上手,日常管理維護(hù)便捷
最小影響:場(chǎng)地改動(dòng)小,占地面積小,不影響正常生產(chǎn)
快速部署:在實(shí)際部署中能最大限度降低客戶開(kāi)發(fā)及使用成本,能快速上線應(yīng)用
全流程服務(wù):完善的售中-售后服務(wù),保證從安裝調(diào)試、技術(shù)支持、維修維護(hù)的全鏈交鑰匙工程
客戶案例
國(guó)內(nèi)某知名大型企業(yè)化工生產(chǎn)車間,原材料投料采用人工上料,因?yàn)楣ぷ鞔嬖诜蹓m、重復(fù)搬運(yùn)、耗費(fèi)體力等多因素影響,崗位人員流動(dòng)大難以管理,尋找自動(dòng)化軟包拆垛解決方案。
考察現(xiàn)場(chǎng)有白熾燈、側(cè)面日光等光線干擾,且堆垛存在碼放不規(guī)范、垛型傾斜等情況,客戶希望準(zhǔn)確率在99%以上,盡量減少人工干涉,提升拆垛效率。固定式安裝的3D傳感器視覺(jué)處理節(jié)拍要領(lǐng)先于機(jī)械臂5-8s工作節(jié)拍,項(xiàng)目部署快速,不影響現(xiàn)場(chǎng)正常作業(yè)。

針對(duì)以上需求,圖漾標(biāo)準(zhǔn)化3D視覺(jué)軟包拆垛解決方案幫助客戶快速實(shí)現(xiàn)自動(dòng)化拆垛應(yīng)用。


