








達明機器人AI Cobot (TM AI Cobot) 具備高性能與高度兼容性,內(nèi)建視覺系統(tǒng)讓機器人看得見,并擁有AI 大腦將影像數(shù)據(jù)轉(zhuǎn)譯成命令提示的能力,進行辨識、定位、偵測等工作,再與手臂結(jié)合一起執(zhí)行工作任務(wù)。在 AI 時代,達明機器人 AI Cobot是您實現(xiàn)智慧工廠的理想選擇!
達明機器人AI Cobot

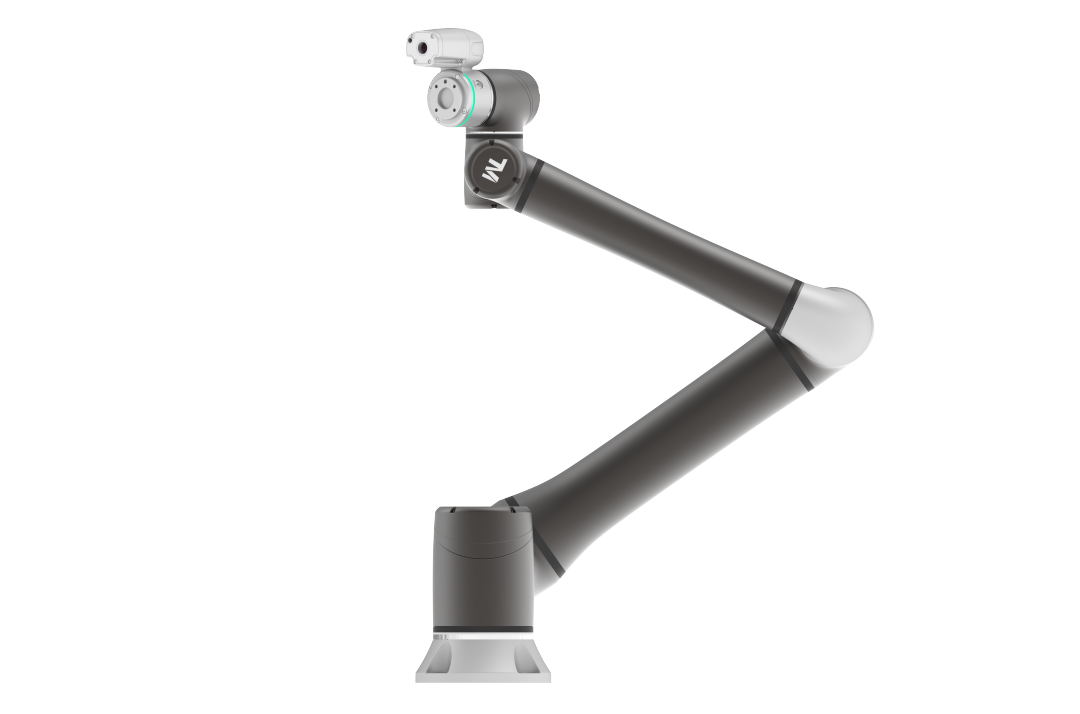
新品:TM16
TM16專為更高的負載需求所設(shè)計,適用于機加工上下料的搬運、物流搬運和包裝等應(yīng)用。此機型能搬運更重的材料與大型產(chǎn)品,有效幫助您提高生產(chǎn)率。TM16有精準位置重現(xiàn)能力與達明機器人卓越的視覺系統(tǒng),使得我們的協(xié)作機器人可以非常準確地執(zhí)行任務(wù)。TM16常用于汽車業(yè)、機械加工和物流產(chǎn)業(yè)。
★可達范圍:900mm
★負載能力:16kg
★重量:32kg
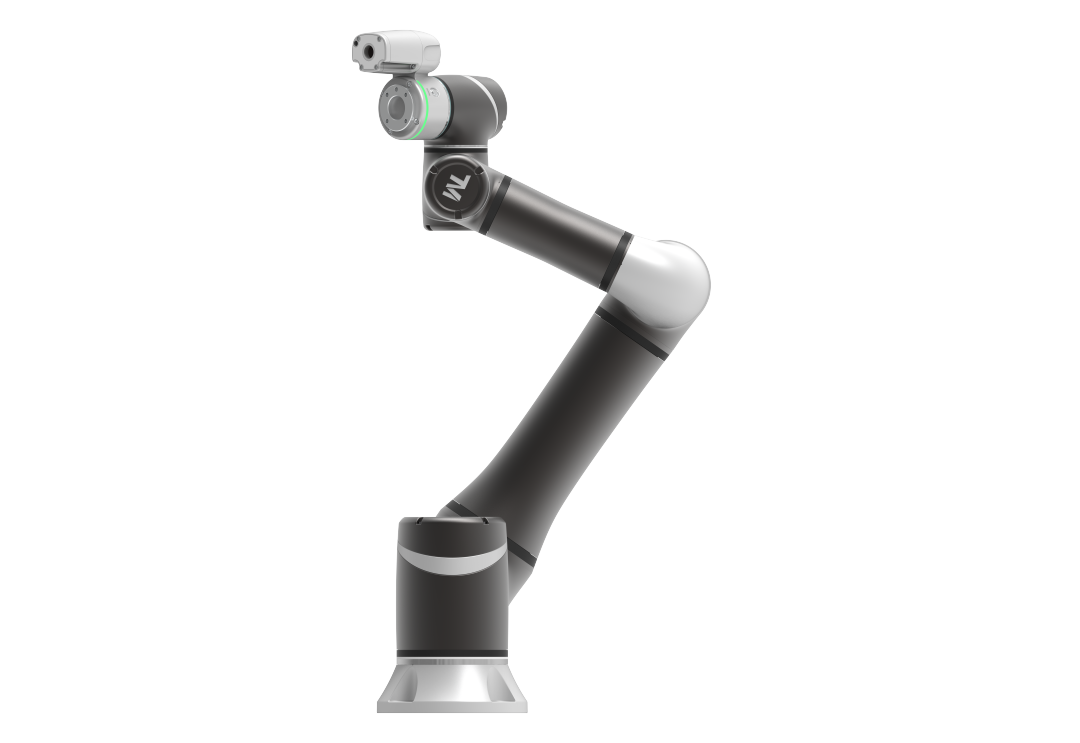
新品:TM20
TM20是達明機器人AI Cobot系列中高負載的手臂。它能夠負重高達 20 公斤,輕松滿足更大、更重的應(yīng)用,進一步擴展機器人自動化的范疇。專為大量取放、重型機器管理以及大容量的包裝和堆棧所設(shè)計。TM20適用于多種應(yīng)用并能適用在大部分的產(chǎn)業(yè)。
★可達范圍:1300mm
★負載能力:20kg
★重量:32.8kg
達明機器人AI Cobot產(chǎn)業(yè)應(yīng)用
TM5-700
3D 視覺取物、組裝貼標、取放、PCB 加工、PCB 檢測取放、拋光& 去毛邊品質(zhì)檢測、螺絲鎖附。
TM5-900
3D 視覺取物、AGV組裝、輸送帶追蹤點膠& 涂膠、貼標機臺操作、包裝、焊接PCB 加工、PCB 檢測取放、拋光& 去毛邊品質(zhì)檢測、螺絲鎖附。
TM12/ TM14
3D 視覺取物、AGV輸送帶追蹤、塑料射出機臺操作、包裝、堆棧PCB 加工、PCB 檢測取放、拋光& 去毛邊螺絲鎖附、焊接。
TM16/ TM20
3D 視覺取物、AGV輸送帶追蹤、塑料射出機臺操作、包裝、堆棧取放、拋光&去毛邊螺絲鎖附、焊接。
無視覺版本機器人
無內(nèi)建視覺版本手臂適合有特殊需求的使用者自行整合外部視覺系統(tǒng),還可參考TM Plug&Play挑選已經(jīng)通過達明機器人驗證的外接相機,節(jié)省整合時間。

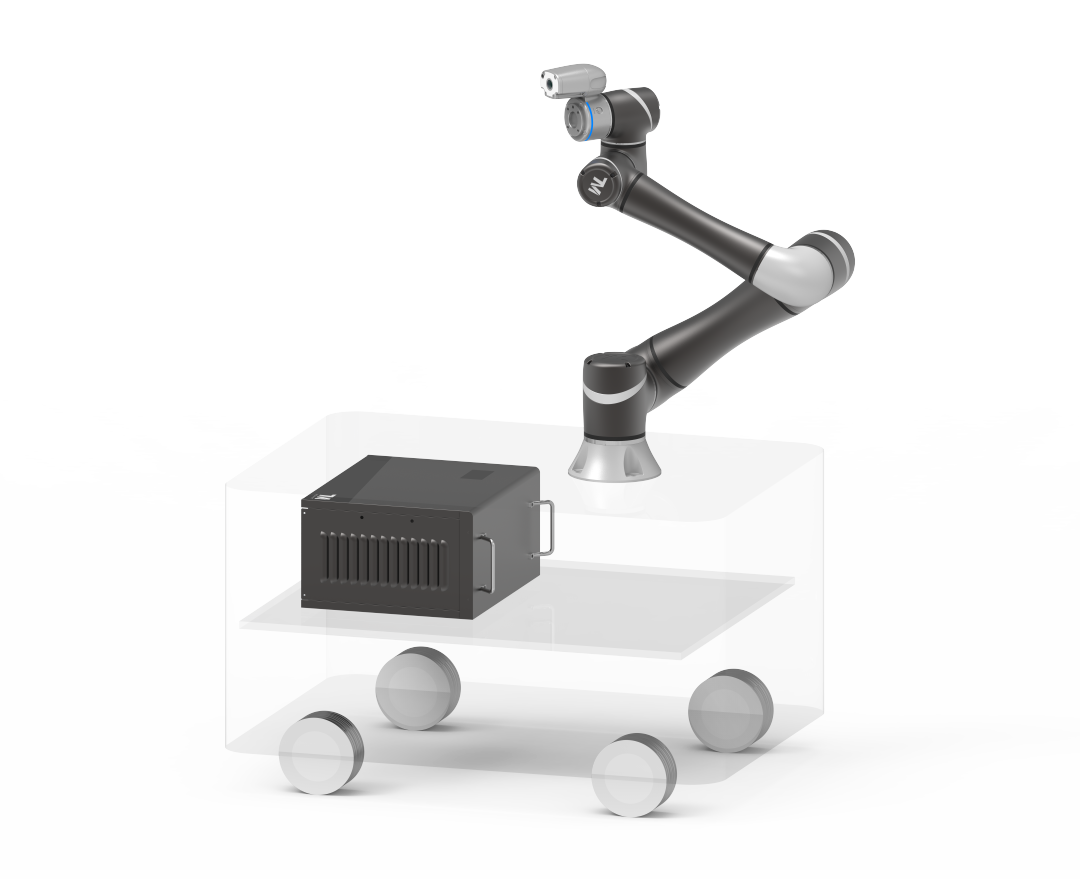
移動式機器人系列
移動式機器人系列可兼容幾乎所有品牌的AGV/AMR,搭配內(nèi)建視覺與 TM Landmark功能,非常適用于移動式堆棧、機臺上下料或其他要求手臂擁有機動性的應(yīng)用。
達明機器人的應(yīng)用優(yōu)勢
取放料應(yīng)用 (Pick & Place)
*使用TM Landmark,彈性布置手臂與周邊位置
*2D Vision,高定位精度,重復(fù)誤差 0.07±0.02mm
*3D Vision ,支持散亂堆棧取料應(yīng)用、非平面物體定位
*無需圍欄
自主移動機器人AMR
*使用TM Landmark,智能補償自走車輛到定位的重復(fù)誤差
*M 系列, DC 電源輸入,易于AMR 整合
*智慧堆棧 (Smart Palletizing)
*使用TM Landmark,加速定位來料位置
智慧堆棧 (Smart Palletizing)
*2D Vision ,來料不固定與分類
*支持同時2 種箱堆棧, 換棧, 解棧
*整合立柱控制最高可以堆到2.3m
焊接應(yīng)用 (Welding)
*TMflow用戶接口讓焊接教導(dǎo)更簡單
*簡單操作,手拉直接教導(dǎo),程序自動生成路徑,數(shù)分鐘內(nèi)即可開始焊接作業(yè)
*焊接專用的參數(shù)設(shè)定頁面,包含電壓/ 電流/速度/ 擺弧等常用功能
*擁有焊機專用設(shè)定接口,可快速設(shè)定手臂與焊機間的通訊控制,支持市面上常用焊機
餐飲應(yīng)用 (Food & Service)
*使用TM Landmark,彈性布置手臂與周邊位置
*與人協(xié)作,無需圍欄
*AI Vision,非規(guī)則物體( 如章魚燒) 的辨識、品質(zhì)檢測
AOI 檢測 (AOI Inspection)
*AI & 機器視覺,支持條形碼讀取、文字識別、組配有無、量測、瑕疵檢測等應(yīng)用
*使用TM Landmark,彈性布置手臂與周邊位置
*2D & 3D Vision,補償來料定位誤差TM Image Manager,圖像儲存與檢索,建立產(chǎn)品數(shù)字履歷


